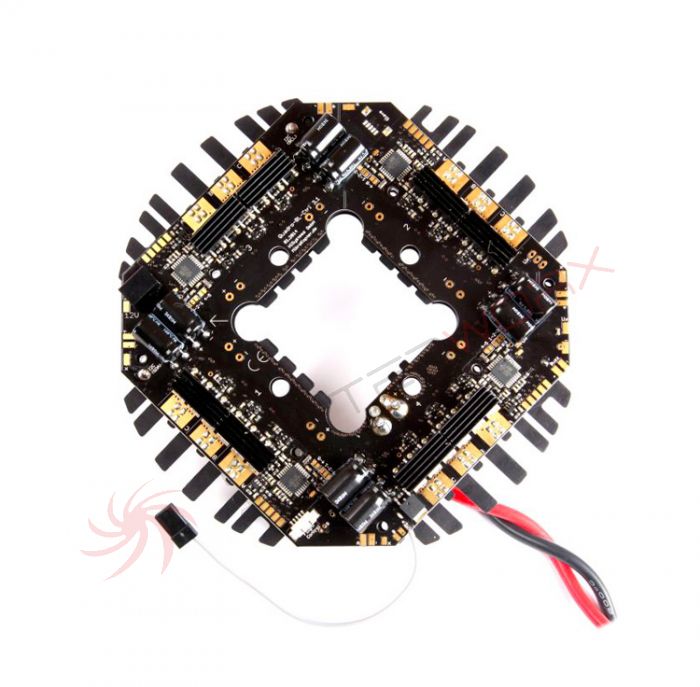
Double Quadro V3 - Cool Redundance
Last one!
SKU
quadrored
Special Price €841.80 €690.00 Regular Price €1,049.00
.
8 ESCs on two boards (for Oktos) with heat sink! Extremely fast brushless controllers version V3 for our MikroKopter.
Version with second databus for redundance operation
IMPORTANT: Use FlightCtrl Firmware V2.02 (or higher), otherwise read the instructions in the wiki !
The board is tested and programmed (including bootloader)
FlightCtrl, NaviCtrl, MKGPS and RC-Empfänger (see photo) are NOT included!
power
- voltage : 10 to 30V -> 3 -7S Lipo
- 6 -layer PCB for optimal heat dissipation . 70u copper layers make the entire circuit board to the heat sink .
- current: up to 60A (per BL-Unit) and 240A (all together) with appropriate cooling
- current limiting and temperature limiting
- Active freewheeling -> less power loss
Fast response with speed control
- rapid acceleration and braking of the propeller. Active and seamless braking gives the speed precisely and quickly on the new setpoint .
- return energy to the lipo when braking. Seamless transition from acceleration to braking
- significantly faster control with speed control
- Video
Redundance
- Operation with one ore two FlightControls possible
- all 8-BL-Controllers with additional second databus (UART)
- Two Lipo connection cables
- Connection of a secondary FlightControl via 3-line Molex cable
Other Features
- Integrated Buzzer
- Integrated 12V voltage regulator for external LED-Supply
- Switchable LED output -> LEDs can flash in case of undervoltage
- Adjustable motor timing in several steps of 13-28° - compatible with the most common BL motors
- Adjustable switching frequency ( 10kHz - 20kHz )
- PPM to 500 Hz with simultaneous I2C - bus operation for telemetry and data logging
- Integrated 12V stabilization for LED lighting and other 12V appliances
- Switchable outputs for lighting -> ZB The blinking lights at low voltage
- Software adjustable direction of rotation
- Adjustable current and temperature limits
- Adjustable start-PWM
- Silent Start: test tone at startup can be disabled
Interface
- various interfaces for setpoint input ( I2C, PPM ( 500Hz ) , serial)
- Integrated current measurement measurement of the actual current and the used capacity on the Mikrokopter control
- voltage and temperature measurement with data transmission to the ground station and data logging
- 11-bit resolution (2048 steps )
- various feedback to the MikroKopter-FlightCtrl ( blocked motor , power limiting , etc. )
- extented configuration options (eg current limit , temperature limit , ...)
- two LEDs (OK and Error )
- Adressable by loder-jumpers (address 1-8)
- I2C bus access possible in PPM mode - for data logging and telemetry in PPM mode
- status messages are transmitted to the FC ( engine blocks , Current, Self-test error ...)
- current measurement up to 75A per controller
- Convenient configuration of the BL controller via FC
mechanical data
- hole: 3mm
- Dimensions (W x H ): see documention in the Wiki
- weight: ca. 260g
delivery
- 2 SMD preassembled, programmed and tested boards already mounted and soldered
- Lipo Power cable (open ends)
- 1-line cable for LED output control
General Notice
- The electronic components must be protected from moisture and humidity. When operating under such special conditions a corresponding (removable) protective coating must be used.
Links
Write Your Own Review